初中物理 | 考点精讲(中考一轮复习:简单机械) |
考点1:杠杆
1. 定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
【说明】
①“硬棒”不一定是棒,泛指有一定长度的,在外力作用下不变形的物体。
②杠杆可直可曲,形状任意。
③有些情况下,可将杠杆实际转一下,来帮助确定支点。如:钓鱼竿、铁锹。
2. 五要素——组成杠杆的示意图。
①支点:杠杆绕着转动的点,用字母O表示。
②动力:使杠杆转动的力,用字母F1表示。
③阻力:阻碍杠杆转动的力,用字母F2表示。
【说明】动力、阻力都是杠杆受的力,所以作用点都在杠杆上。
④动力臂:从支点到动力作用线的距离,用字母l1表示。
⑤阻力臂:从支点到阻力作用线的距离,用字母l2表示。
【画力臂的方法】
①确定杠杆支点的方法是根据平时的体验,判断杠杆绕着哪点转动,则这一点就是支点。
②力的作用线是沿力的方向所画的直线。在画力臂时,如果力的作用线太短,可用虚线将力的作用线延长。
③力臂不是支点到力的作用点的距离。
④力臂用实线表示,力的作用线用虚线表示。力臂部分要用大括号标出来。
【注意】
①当动力、阻力在支点两侧时,它们的方向大致相同;
②当动力、阻力在支点一侧时,它们的方向大致相反。
3. 重点探究:杠杆的平衡条件
(1)杠杆的平衡:当杠杆在动力和阻力作用下静止或绕支点匀速转动时,我们就说杠杆平衡了。
(2)实验设计
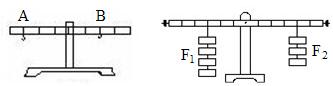
①调节杠杆两端的螺母(和天平的调节方法相同),使杠杆在不挂钩码时,保持水平并静止,达到平衡状态。
②给杠杆两端挂上不同数量的钩码,移动钩码的位置,使杠杆保持水平并静止。记下动力、阻力,测量动力臂和阻力臂。
③改变力和力臂的数值,再做两次实验,将数据记录在表格中。
④根据表格中的数据进行分析,例如可以对它们进行加、减、乘、除等运算,找出它们之间的关系。
【注意】
实验前调节杠杆两端的螺母,使杠杆在水平位置平衡,目的是:可以方便的从杠杆上量出力臂。
(3)实验结论
杠杆的平衡条件是:动力×动力臂=阻力×阻力臂。
(4)注意事项
①多次实验的原因:只做一次实验,获得的结论具有偶然性,不能反映普遍规律。
②不同物理量之间不能进行加、减运算。
4. 杠杆的平衡条件:
(1)应用
计算力或力臂的大小、判断杠杆是否平衡、确定杠杆的种类、画出最小力臂等。
(2)根据杠杆平衡条件判断杠杆平衡的方法
①计算动力与动力臂的乘积、计算阻力与阻力臂的乘积;
②比较两个乘积的大小,若相等则杠杆平衡;若不相等,则杠杆不平衡,杠杆将向乘积较大的一方偏转。
(3![]() )利用杠杆平衡条件判断力的大小变化的方法
)利用杠杆平衡条件判断力的大小变化的方法
①找出杠杆的支点和作用在杠杆上的力及力臂;
②依据题意,确定力和力臂中哪些量的大小不变,哪些量的大小变化;
③应用F1l1=F2l2判断出力或力臂的变化。
(4)解决杠杆平衡时动力最小问题
此类问题中“阻力×阻力臂”为一定值,要使动力最小,必须使动力臂最大。
①如果动力作用点已给出,那么支点到动力作用点的连线是最长力臂。
②如果动力作用点没有确定,则选择杠杆上离支点最远的点为动力作用点,以支点与动力作用点的连线所作力臂是最长的力臂。
5. 杠杆的分类
名称 | 结构特征 | 特点 | 应用举例 |
省力杠杆 | 动力臂大于阻力臂 | 省力、费距离 | 撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀 |
费力杠杆 | 动力臂小于阻力臂 | 费力、省距离 | 缝纫机踏板、起重臂 人的前臂、理发剪刀、钓鱼竿 |
等臂杠杆 | 动力臂等于阻力臂 | 不省力、不费力 | 天平、定滑轮 |
【说明】
应根据实际情况来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
考点2:滑轮
1. 定义
周边有槽,中心有一转动轴的轮子叫滑轮,如上图所示。因为滑轮可以连续旋转,因此可看做是能够连续旋转的杠杆,仍可以用杠杆的平衡条件来分析。根据使用情况不同,滑轮可分为定滑轮和动滑轮。
2. 定滑轮
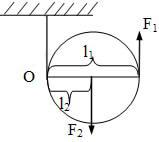
①定义:中间的轴固定不动的滑轮。
②实质:等臂杠杆。
图中O可看做支点,其动力臂l1=r ,阻力臂l2=r,根据杠杆平衡条件:,即,得出F1=F2,当重物竖直匀速向上时,F2=G,则F1=G。
③特点:使用定滑轮不能省力但是能改变力的方向。
所谓“改变力的方向”是指我们施加某一方向的力能得到一个与该力方向不同的力。
④对于理想的定滑轮(不计轮轴间摩擦),有F=G。
⑤绳子自由端移动距离sF=重物移动的距离sG。
⑥绳子自由端移动速度vF=重物移动速度vG。
3. 动滑轮
①定义:和重物一起移动的滑轮。(可上下移动,也可左右移动)。
②实质:动力臂为阻力臂2倍的省力杠杆。
图中O可看做支点,其动力臂l1=2r,阻力臂l2=r,根据杠杆平衡条件:F1l1=F2l2,即F12r=F2r,得出2F1=F2,当重物竖直匀速向上时,F2=G,则F1=G。
③特点:使用动滑轮能省一半的力,但不能改变力的方向。
④对于理想的动滑轮(不计轴间摩擦和动滑轮重力),有F=G。
若只忽略轮轴间的摩擦,则拉力F=(G物+G动)
⑤绳子自由端移动距离等于2倍的重物移动距离:sF=2sG。
⑥绳子自由端移动速度等于2倍的重物移动速度:vF=2vG。
4. 滑轮组
①定义:定滑轮、动滑轮组合成滑轮组。
②特点:使用滑轮组既能省力又能改变力的方向。
③对于理想的滑轮组(不计轮轴间的摩擦和动滑轮的重力),有拉力。
若只忽略轮轴间的摩擦,则拉力F=(G物+G动)。
④绳子自由端移动距离等于n倍的重物移动距离:sF=nsG
⑤绳子自由端移动速度等于n倍的重物移动速度:vF=nvG
⑥组装滑轮组的方法
a. 根据公式求出绳子的股数。
b.确定动、定滑轮个数:一个动滑轮应配置一个定滑轮,当动滑轮上为偶数段绳子时,可减少一个定滑轮,但若要求改变力的作用方向时,则应再增加一个定滑轮。
c. 在确定动、定滑轮个数后,绳子的连接应遵循“奇拴动、偶拴定”的规则,由内向外缠绕滑轮。